
Светодиодная лампа SMD 4000 5730 5630 50-55 лм 0 5 Вт холодный белый свет 10000 К | Освещение
739,59 руб. / набор


Новое поступление

Магазина SchoolDIY Store работает с 04.06.2020. его рейтинг составлет 91.13 баллов из 100. В избранное добавили 1410 покупателя. Средний рейтинг торваров продавца 4.7 в продаже представленно 3614 наименований товаров, успешно доставлено 1032 заказов. 462 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 1 063,21 руб. уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Aug-15-2025 | 1350.84 руб. | 1377.97 руб. | 1363.5 руб. |
| Jul-15-2025 | 1095.68 руб. | 1117.75 руб. | 1106 руб. |
| Jun-15-2025 | 1329.70 руб. | 1356.99 руб. | 1342.5 руб. |
| May-15-2025 | 1318.75 руб. | 1344.76 руб. | 1331 руб. |
| Apr-15-2025 | 1052.63 руб. | 1073.77 руб. | 1062.5 руб. |
| Mar-15-2025 | 1297.31 руб. | 1323.53 руб. | 1310 руб. |
| Feb-15-2025 | 1286.33 руб. | 1312.11 руб. | 1299 руб. |
| Jan-15-2025 | 1276.51 руб. | 1302.22 руб. | 1289 руб. |
Описание товара



Название = ckeditor


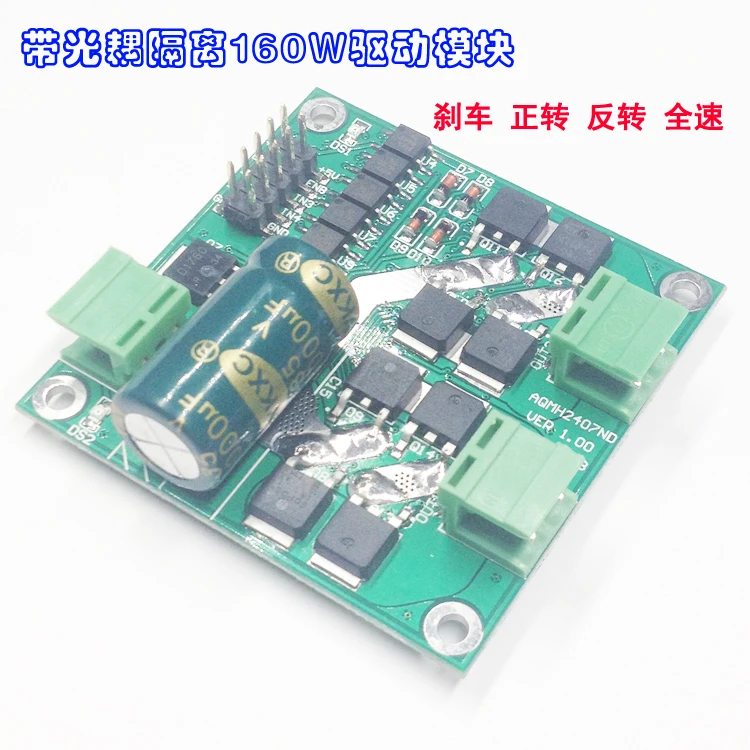
Размер: 5,5 см × 5,5 см
Поддержка напряжения 7 В ~ 24 В, защита от пониженного напряжения
Интерфейс с двумя двигателями, каждый Номинальный выходной ток 7A
Как и логика управления L298, каждый канал поддерживает Трехпроводное Управление включением, прямым и обратным ходом и тормозом
Сигнал включения может быть подключен внешне к ШИМ, а положительный и отрицательный сигналы управления могут быть последовательно подключены с помощью концевых переключателей.
В сигнале управления используется режим привода тока поглощения, который поддерживает прямой привод большинства микроконтроллеров.
Используйте оптопару для изоляции всех сигналов управления
Со схемой статического разряда
В этом модуле H-bridge используется цепь затвора и комбинация МОП-транзисторы для реализации управления двигателем вперед и назад, торможением и регулированием скорости. Он имеет как больший выходной ток, так и гибкую логику управляющего сигнала, похожую на L298.
Метод обработки помех: изоляция оптопары сигнала управления, подавление напряжения шипа источника питания.
Логика управляющего сигнала: Используйте цепь ворот для реализации логики управления, похожей на L298.
Метод реализации H моста: Используйте P, N дополнительные МОП-трубки для реализации H-моста.
Защита источника питания от пониженного напряжения: Используйте чип сброса для обеспечения защиты от пониженного напряжения.
Диапазон входного напряжения: 6,5 В ~ 27 В постоянного тока
Номинальное входное напряжение: 12 В/24 В постоянного тока
Количество выходных каналов: 2
Номинальный выходной ток на канал: 7а
Пиковый выходной ток на канал: 50 А
Номинальная выходная мощность на канал: 84 Вт (источник питания 12 В)/ 168 Вт (источник питания 24 В)
Напряжение управляющего сигнала: 3 ~ 6,5 в
Ток каждого управляющего сигнала: 3 ~ 11 мА
Минимальная Эффективная ширина импульса ШИМ: 5 мкс
Рабочая температура: -25 ℃ ~ 80 ℃
Размер: 5,5 см × 5,5 см × 2,0 см
Подходящие параметры двигателя:
Двигатель с номинальным напряжением 24 В подходит для маркировки номинальной мощности 115 Вт или менее или двигателя с номинальным током 7 А или менее в течение длительного времени на полной мощности
Двигатель с номинальным напряжением 12 В подходит для маркировки номинальной мощности 40 Вт или менее или двигателя с номинальным током 7 А или менее в течение длительного времени на полной мощности
(Привод может выдавать Номинальный ток 7А в течение длительного времени, но Номинальная мощность, отмеченная на двигателе, как правило, относится к выходной мощности, учитывая потери работы двигателя, поэтому КПД двигателя следует учитывать при расчете номинального тока, номинальный ток = Номинальная мощность/Номинальное напряжение/КПД)

Логика управляющего сигнала
1. Интерфейс двигателя 1 логика управляющего сигнала
| В 1 | IN2 | ENA | Выход OUT1 、 OUT2 |
| 0 | 0 | × | Тормоз |
| 1 | 1 | × | Подвесной |
| 1 | 0 | ШИМ | Нормальная скорость |
| 0 | 1 | ШИМ | Обратная скорость |
| 1 | 0 | 1 | Полная скорость вперед |
| 0 | 1 | 1 | Реверс полный |
Примечание: когда входной сигнал плавающий, это высокий уровень
2. Интерфейс двигателя 2. Логика управляющего сигнала
| IN3 | IN4 | ЭНБ | Выход OUT3, OUT4 |
| 0 | 0 | × | Тормоз |
| 1 | 1 | × | Подвесной |
| 1 | 0 | ШИМ | Нормальная скорость |
| 0 | 1 | ШИМ | Обратная скорость |
| 1 | 0 | 1 | Полная скорость вперед |
| 0 | 1 | 1 | Реверс полный |
Примечание: когда входной сигнал плавающий, это высокий уровень
Типичный пример подключения
1. Используйте микрокомпьютер с одним чипом для управления методом вращения двигателя

Блок питания однокристального микрокомпьютера и блок питания управляющего сигнала платы привода должны иметь одинаковую поверхность, но не одинаковую поверхность с блоком питания двигателя. При использовании однокристального микрокомпьютера 5 в плата драйвера + 5 В подключается к источнику питания + 5 В; При использовании однокристального микрокомпьютера 3,3 В, плата драйвера + 5 В подключена к источнику питания 3,3 В. Сигналы управления однокристального микрокомпьютера и платы привода могут использоваться совместно с источником питания или независимым источником питания (но должны использоваться совместно). ENA подключается к выходному порту GPIO или PWM однокристального микрокомпьютера. Когда ENA высокий, плата привода включена, вперед и назад или тормоз эффективен. Если это ШИМ-сигнал, двигатель можно регулировать; Когда он низкий, привод платы отключен, а интерфейс двигателя не имеет выхода. IN1 и IN2 подключены к двум ГПУ однокристального микрокомпьютера (поддерживает любой порт ввода-вывода однокристального микрокомпьютера 51 без подтягивающего резистора) для управления прямым и обратным вращением и торможением двигателя. Логика драйвера отображается в логической таблице.
2. Используйте кнопки для управления прямым и обратным способом подключения двигателя.

Среди них PB1 и PB2 есть две кнопки. Когда PB2 нажата, но PB1 не нажата, IN1 высокая, IN2 низкая, и двигатель вращается вперед; Когда PB2 нажата, но PB1 не нажата, в1 низкий и IN2 высокий, двигатель переворачивается; Когда PB1 и PB2 оба нажаты вниз или оба выскакивают вверх, IN2 и IN2 низкие или высокие, и моторные тормоза (или тормоза). См. Логическую таблицу для управления логикой сигнала.

Размер 5,5 см × 5,5 см × 2,0 см. Диаметр установочного отверстия составляет 3 мм, для крепления рекомендуется использовать винты м3. Будьте осторожны, чтобы не короткое замыкание задней цепи во время установки. Вы можете добавить изоляционные прокладки или использовать медные стойки для подъема печатной платы.
Меры предосторожности
1) Источник питания привода не должен быть отменен. Рекомендуется последовательно подключать предохранитель 15А к интерфейсу питания, а напряжение должно быть от 6,5 В до 27 в. Если напряжение перенапряжение, модуль привода может сгореть при включении питания.
2) рекомендуется, чтобы Номинальный выходной ток источника питания более чем в 2 раза превышал Номинальный ток двигателя, чтобы не приводить к тому, что источник питания не обеспечивает необходимый ток при включении двигателя, и привести к снижению напряжения источника питания. Прерывание выходного сигнала приводит к остановке двигателя.
3) Интерфейс двигателя не должен быть коротким замыканием, иначе модуль привода может сгореть. Рекомендуется последовательно подключать предохранитель на 10 А к интерфейсу двигателя.
5) привод должен быть подключен к двигателю перед включением во избежание случайного короткого замыкания и сгорания модуля привода.
6) обратите внимание, что водитель не намокает, не замыкайте компоненты на плате драйвера и не трогайте контакты и колодки компонентов на плате руками.
Смотрите так же другие товары:






