


Новое поступление

Фигурка героя из аниме Невероятные приключения Джоджо Nendoroid 1624 Dio Brando 1516 Цезарь
1015.32

Фигурка аниме соблазнительная аниме-фигурка авара савара из ПВХ фигурка девушки
2343.2

100% оригинальная коллекция Banpresto Золотой ветер фигурка галерея 5 фигурка-Pannacotta Fugo -
4873.6

THF трансформер шедевр THF04 THF-04 Ultra Magnus MP Leader KO MP22 MP-22 из сплава грузовик экшн-фигурка
6785.6

Кошмарным Фигурки Nendoroid Хината Shoyo 461 # ПВХ аниме волейбол Коллекция Модель

DC Comics Бэтмен Джокер Робин Hottoys Q версия мини 10-12 см Коллекционные фигурки подарок

Сжимаемые пельмени в виде животных снятие стресса кавайные Игрушки для девочек
Характеристики
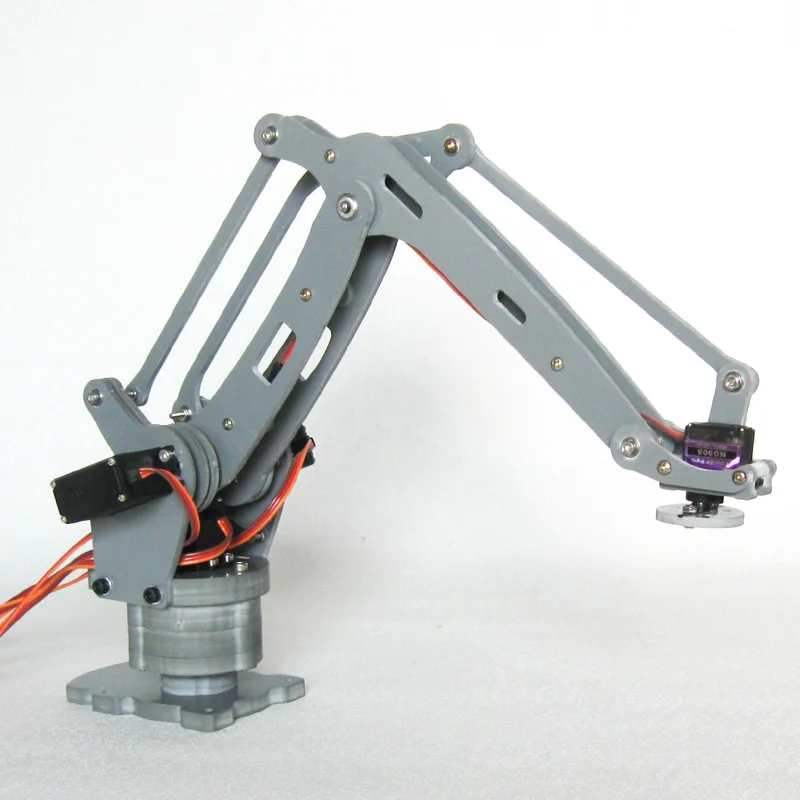
ABB irb 460 промышленная модель роботизированной руки осевая паллейка CNC 4-DOF
История изменения цены
*Текущая стоимость уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Sep-17-2025 | 0.94 руб. | 0.82 руб. | 0 руб. |
| Aug-17-2025 | 0.64 руб. | 0.30 руб. | 0 руб. |
| Jul-17-2025 | 0.18 руб. | 0.1 руб. | 0 руб. |
| Jun-17-2025 | 0.41 руб. | 0.64 руб. | 0 руб. |
| May-17-2025 | 0.13 руб. | 0.68 руб. | 0 руб. |
| Apr-17-2025 | 0.78 руб. | 0.86 руб. | 0 руб. |
| Mar-17-2025 | 0.75 руб. | 0.21 руб. | 0 руб. |
| Feb-17-2025 | 0.6 руб. | 0.60 руб. | 0 руб. |
| Jan-17-2025 | 0.30 руб. | 0.0 руб. | 0 руб. |
Описание товара



Описание
ABB irb 460 промышленная Роботизированная рука модель
Ось palletizing CNC 4-DOF модель манипулятора
Для преподавания и эксперимент

Характеристики роботизированной руки:
Нагрузка: около 300 граммов, чем меньше угол опоры, тем больше Имитирует настоящую структуру рукоятки робота-паллетиста, моделирует детали Рама из ПВХ, обработка ЧПУ Использование трех MG996r медная шестерня 13 кг/см рабочий Крутящий момент сервопривода 180 градусов Подвижные детали (шарнир) с помощью соединения подшипника Без логотипа, товаров для телефона Обеспечить демонстрационная программа Модификации винты Модель манипулятора в сборе, проверка доставки Предоставляем обучающие материалы arduin0, манипулятор управления исходным кодом Сервоманипулятор с использованием модели, ориентированной на обучение и тестирование, не подходит для работы в трубопроводе Серводвигатель с помощью общего редуктора, серводвигатель на запястье имеет свободный ход около 4 мм В комплект входит: Пункт 1: только рама с сервоприводом (в сборе) Пункт 2: полный комплект (рамка + контроллер + блок питания) Размер: Детали:
Детали:


 Пример управления роботизированной рукояткой: (управление arduin0, примеры демонстрируют, что угол вращения видео немного отличается)
Пример управления роботизированной рукояткой: (управление arduin0, примеры демонстрируют, что угол вращения видео немного отличается)
 Управляющего кодом образца:
/Развертки
# Включая <сервопривод. h>
Сервопривод myservoA; /Создание серводвигателя для управления Сервоприводом
Сервопривод myservob;
Сервопривод myservoc;
Сервопривод myservod;
Int pos = 20; /Переменная для хранения положения сервопривода
Вакуум установка ()
{
MyservoA. Прикрепить (9); /прикрепляет сервопривод на штыревой 9,10,11,6 к сервообъекту
MyservoB. Прикрепить (10);
MyservoC. Прикрепить (11);
MyservoD. attach(6);
}
Силы петли ()
{
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write(int (карта (pos,1,1000,65,30); /скажите сервоприводу, чтобы перейти в положение в переменной 'pose'
MyservoC. write(int (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoB. write (карта (pos, 1500, 30,65);
MyservoC. write (карта (pos, 1500, 70,50);
MyservoA. write(70);
Задержка (1);
}
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoA. write (карта (pos, 1500, 70150);
MyservoD. write (карта (pos, 1500, 0180);
Задержка (1); /waits 1ms * 500 для сервопривода, чтобы достичь положения
}
Для (pos = 0; pos < 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,65,30);
MyservoC. write (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,30,65);
MyservoC. write (карта (pos,1,1000,70,50);
Задержка (1);
}
Для (pos = 0; pos<= 1000; pos + = 1)
{
MyservoA. write (карта (pos,1,1000,150,70);
MyservoD. write (карта (pos,1,1000,180,0);
Задержка (1);
}
Управляющего кодом образца:
/Развертки
# Включая <сервопривод. h>
Сервопривод myservoA; /Создание серводвигателя для управления Сервоприводом
Сервопривод myservob;
Сервопривод myservoc;
Сервопривод myservod;
Int pos = 20; /Переменная для хранения положения сервопривода
Вакуум установка ()
{
MyservoA. Прикрепить (9); /прикрепляет сервопривод на штыревой 9,10,11,6 к сервообъекту
MyservoB. Прикрепить (10);
MyservoC. Прикрепить (11);
MyservoD. attach(6);
}
Силы петли ()
{
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write(int (карта (pos,1,1000,65,30); /скажите сервоприводу, чтобы перейти в положение в переменной 'pose'
MyservoC. write(int (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoB. write (карта (pos, 1500, 30,65);
MyservoC. write (карта (pos, 1500, 70,50);
MyservoA. write(70);
Задержка (1);
}
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoA. write (карта (pos, 1500, 70150);
MyservoD. write (карта (pos, 1500, 0180);
Задержка (1); /waits 1ms * 500 для сервопривода, чтобы достичь положения
}
Для (pos = 0; pos < 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,65,30);
MyservoC. write (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,30,65);
MyservoC. write (карта (pos,1,1000,70,50);
Задержка (1);
}
Для (pos = 0; pos<= 1000; pos + = 1)
{
MyservoA. write (карта (pos,1,1000,150,70);
MyservoD. write (карта (pos,1,1000,180,0);
Задержка (1);
}
Смотрите так же другие товары: