
Dynam 1450 мм Primo RC RTF пропеллер с двигателем ESC Servos Battery TH03632|Радиоуправляемые самолеты|
139 182,98 руб.




Новое поступление

Магазина ShenZhen Qizhi Electronic Co., Ltd работает с 21.04.2015. его рейтинг составлет 93.26 баллов из 100. В избранное добавили 2585 покупателя. Средний рейтинг торваров продавца 4.7 в продаже представленно 989 наименований товаров, успешно доставлено 8209 заказов. 1646 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 15 059,71 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-05-2026 | 19125.70 руб. | 19508.42 руб. | 19316.5 руб. |
| Feb-05-2026 | 15511.99 руб. | 15821.68 руб. | 15666 руб. |
| Jan-05-2026 | 18824.62 руб. | 19200.49 руб. | 19012 руб. |
| Dec-05-2025 | 18673.55 руб. | 19046.82 руб. | 18859.5 руб. |
| Nov-05-2025 | 14908.67 руб. | 15206.98 руб. | 15057 руб. |
| Oct-05-2025 | 18372.66 руб. | 18739.38 руб. | 18555.5 руб. |
| Sep-05-2025 | 18221.88 руб. | 18585.61 руб. | 18403 руб. |
| Aug-05-2025 | 18071.75 руб. | 18432.21 руб. | 18251.5 руб. |
Описание товара





Посылка включает в себя:
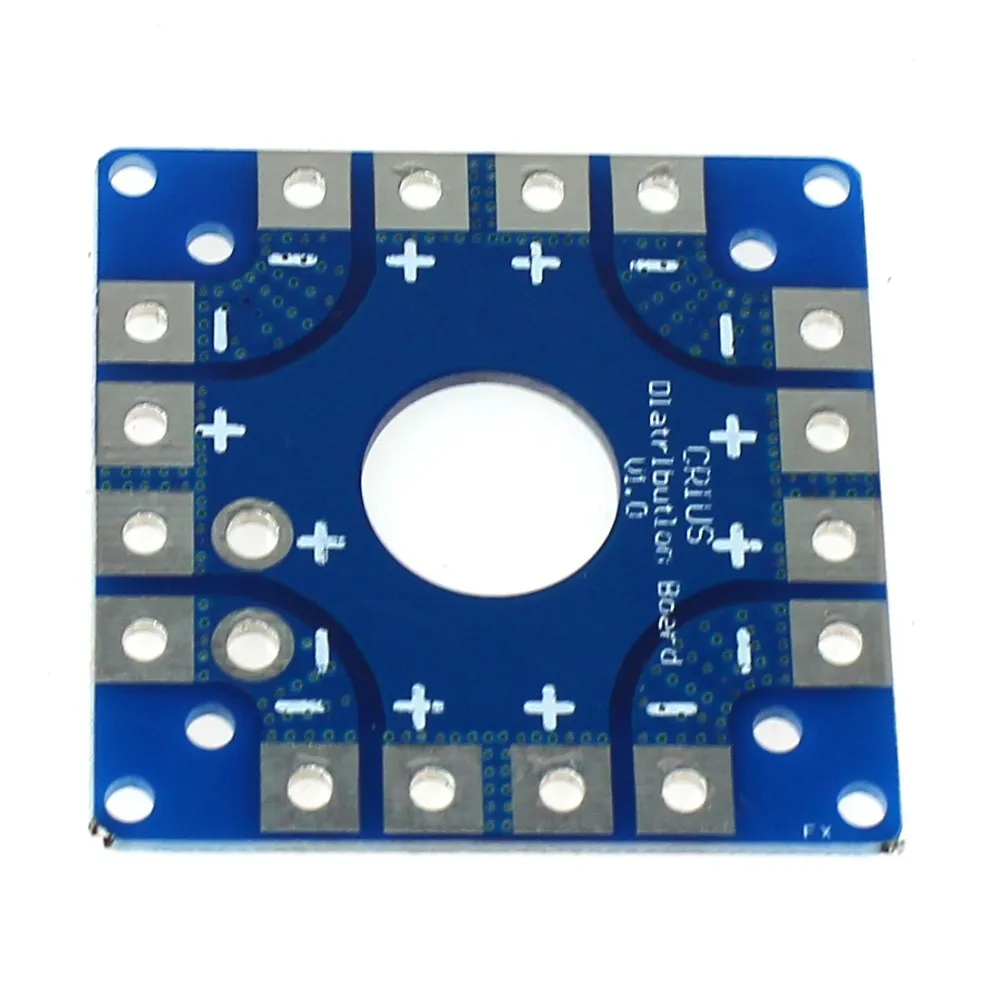
1xX4M360L рамка 2x920 кВ CW бесщеточный мотор 2x920 кВ CCW бесщеточный мотор 4x30A бесщеточный ESC 2X8443 8,4*4,3 "карбоновый пропеллер самофиксирующийся реквизит 1XMK KK мульти-коптер аккумулятор питания до 8 Плата подключения ESC 1XAPM 2,8 Управление полетом 1x6 м GPS с компасом 1x5 шт 10 см сервоприёмник удлинитель провод кабель 1xgps складной держатель антенны 12x3,5 мм вилка типа банан 1xdeans Стиль T штекер Силиконовый провод с 11,5 см 14awg 1 х крепежная лента 1x 11,1 V 3300Mah 25C lipo батарея
Прежде чем настроить APM,
Вам нужно будет сначала подключить все вместе.
Это руководство покажет вам все кабели и детали, которые вам нужно будет подключить к APM.
Типичные Квадрокоптер раскладка клавиатуры
Обратите внимание, что на иллюстрации ниже показана (типичная) установка. Он содержит дополнительное оборудование, включая карданный шарнир камеры и монитор батареи, и он использует проводное соединение ESC «Y», а не распределительную плату, которая является общей для многих мультикоптеров.

1. Подключение ваших двигателей и радиоуправляемых передач
 Обзор соединений на плате Ardupilot Mega v2
Обзор соединений на плате Ardupilot Mega v2
|
Примечание: инструкции ниже предназначены для обычных радиоприемников с выходом ШИМ (один кабель на канал). Если вы используете приемник «PPM» (один кабель имеет все каналы), следуйте инструкциям.
Прежде чем настроить ваш Arducopter, вам нужно будет сначала подключить все вместе. Это довольно просто. Вам нужно подключить Радиоуправляемый приемник к входной стороне платы. Вы можете использовать кабели, Входящие в комплект Arducopter, или если вы используете другую рамку, вы можете использовать соединительные кабели, или женские кабели сервопривода  Соединения между приемником RC и платой Ardupilot Mega v2
Соединения между приемником RC и платой Ardupilot Mega v2
|
Если вы используете женские кабели сервопривода, наземная (черная) сторона каждого разъема должна быть снаружи для платы, сигнал (белый/оранжевый) должен быть внутри, как показано ниже.
|
Если вы используете Многоконтактный разъем, который был включен в комплект Arducopter, подключите их, как показано ниже
|
Обратите внимание, что ваш ESC, разъемы должны быть подключены к выходной стороне, рекомендуется использовать только питание от одного из ваших ESC. Это может быть Дюна путем резки Красного провода на всех, кроме одного из ESC, или с помощью специального адаптера.
2. Соединительные электродвигатели
| Еще раз, если вы используете Arducopter Kit, с PDB, тогда вам не нужно беспокоиться об этом, если вы все правильно спаяете, так как двигатели присваиваются правильным контактам с кабелями, подключенными к предыдущему шагу. Однако вы убедитесь, что ваши двигатели вращаются в правильном направлении. На изображениях ниже показаны возможные конфигурации arducopter с правильной ориентацией двигателя | Быстрый Совет: если ваш двигатель не вращается в правильном направлении, Просто переключите положение любых двух проводов ESC-motor. |
Arducopter Quad
|
Arducopter Tri
|
Arducopter Hexa, Octa и Y6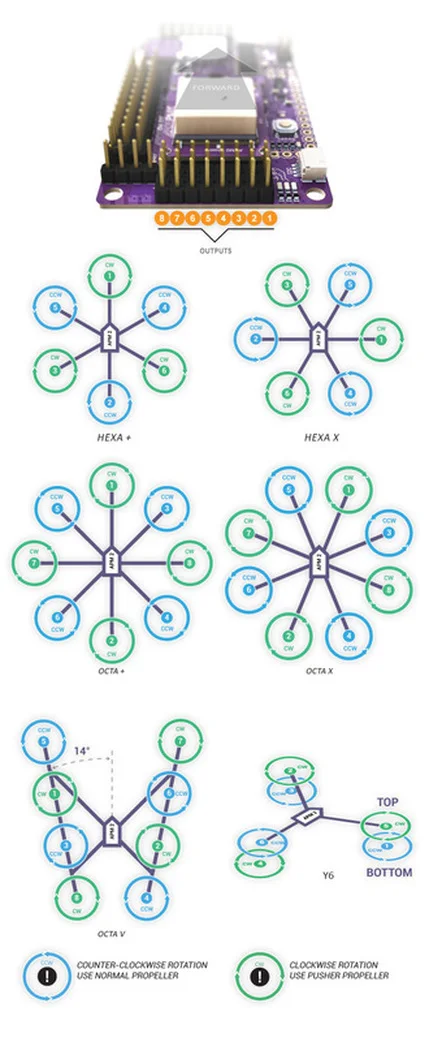
|
Arducopter OCTA QUAD (X8)
Подключение к креплению камеры с поворотом
|
3. Подключение дополнительных датчиков
Сонар-Ультразвуковой дальномерAC2 поддерживает MaxSonar line sonars для удержания на низком уровне высоты и в будущем избегания столкновений. Ниже 10 метров гидролокатор в основном используется для удержания высоты. Выше 10 метров, используется Барометрический датчик. GPS не требуется для удержания высоты. Подключите ультразвуковой датчик к порту A0 платы Ardupilot Mega v2
Подключите ультразвуковой датчик к порту A0 платы Ardupilot Mega v2
|
Сонарные датчики достаточно чувствительны к шуму, добавляя что-то похожее на Ферритовый дроссель к вашему кабелю, может помочь. Самое главное-установить гидролокатор вдали от другой электроники, такой как ESC, или беспроводных телеметрических модулей.
Возможные причины интерфернанса гидролокатора
|
Оптический поток Сенсор Оптический датчик потока используется для повышения точности удержания вашего arducopter. Этот датчик поддерживается Arducopter 2,6 и выше.
Оптический датчик потока используется для повышения точности удержания вашего arducopter. Этот датчик поддерживается Arducopter 2,6 и выше.
Подключение оптического датчика потока к APMv2
|
 Это хорошая идея, чтобы защитить провода с некоторыми кабельные стяжки, так что они не сломаются с течением времени
Это хорошая идея, чтобы защитить провода с некоторыми кабельные стяжки, так что они не сломаются с течением времени
|
Смотрите так же другие товары:











 Об управлении полетом APM 2,8, вот руководство пользователя
Об управлении полетом APM 2,8, вот руководство пользователя
 Подключения с прямыми разъемами
Подключения с прямыми разъемами
 Подключение с угловыми соединителями
Подключение с угловыми соединителями
 Входная сторона для радиоуправляемого ресивера
Входная сторона для радиоуправляемого ресивера
 Выход сбоку в PDB
Выход сбоку в PDB
 Как подключить оптический датчик потока к вашему ardupilot mega board. Убедитесь, что штыри обращены вперед
Теперь, когда все было подключено, все, что нужно сделать, это настроить arducopter прошивку для вашей рамки.
Как подключить оптический датчик потока к вашему ardupilot mega board. Убедитесь, что штыри обращены вперед
Теперь, когда все было подключено, все, что нужно сделать, это настроить arducopter прошивку для вашей рамки.