Характеристики
ABB IRB4400 промышленные роботы arm масштабированная модель 6DOF Роботизированная рука
История изменения цены
*Текущая стоимость 12 182,80 - 14 162,07 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц |
Минимальная цена |
Макс. стоимость |
Цена |
| Apr-05-2026 |
14497.18 руб. |
15222.50 руб. |
14859.5 руб. |
| Mar-05-2026 |
14375.23 руб. |
15094.52 руб. |
14734.5 руб. |
| Feb-05-2026 |
12060.79 руб. |
12663.69 руб. |
12361.5 руб. |
| Jan-05-2026 |
14131.41 руб. |
14838.45 руб. |
14484.5 руб. |
| Dec-05-2025 |
12304.79 руб. |
12919.90 руб. |
12611.5 руб. |
| Nov-05-2025 |
13887.26 руб. |
14581.79 руб. |
14234 руб. |
| Oct-05-2025 |
13766.55 руб. |
14454.72 руб. |
14110 руб. |
| Sep-05-2025 |
13644.96 руб. |
14326.90 руб. |
13985 руб. |
| Aug-05-2025 |
13522.63 руб. |
14198.39 руб. |
13860 руб. |
Описание товара






ABB IRB4400 промышленных роботов arm масштабная модель 6DOF робот-манипулятор для преподавания и эксперимент 6-Axis для рабочего стола, роботизированная рука от китайского производителя
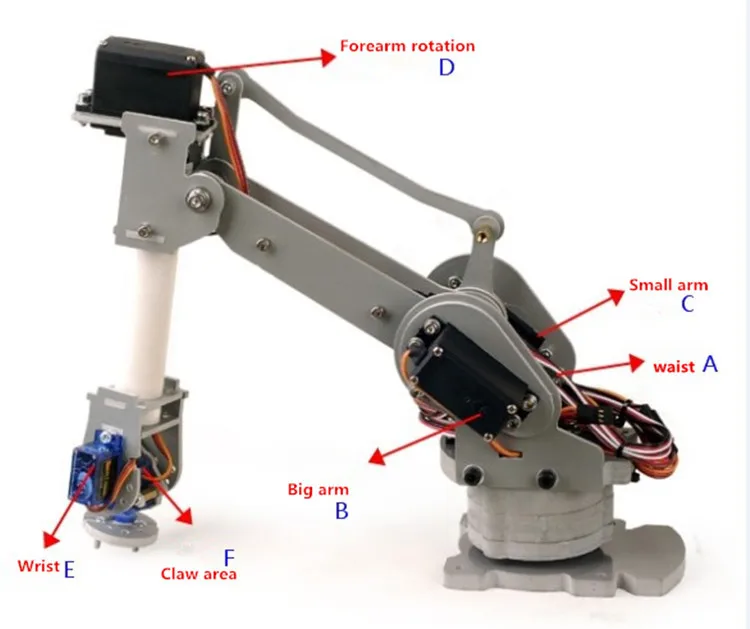
Посылка список: Пункт 1: только рама (включая сервоприводы) Пункт 2: полный комплект (рама, uno r3, расширительные платы, 5V4V импульсный источник питания.) ![08]() Что может сделать шестиосевая модель робота? Модель robot arm-это модель пропорции промышленного робота ABB. Он может фактически контролировать движение модели руки робота в соответствии с идеей числового управления. Он подходит для обучения экспериментам, фокусируется на демонстрации действий и не имеет реальной несущей способности. Какой материал рукоятки робота? Пластина модели манипулятора-ПВХ инженерные пластмассы и изготавливается с ЧПУ. Механическое узкое место роботизированной руки-это крутящий момент сервопривода, пластина манипулятора не деформирована и сервопривод не имеет мощности. Еще одно преимущество инженерного пластика ПВХ заключается в том, что пластичность материала очень подходит для Инкрустированного подшипника, а соединение подшипника используется для повышения точности конструкции. Все шарниры рукоятки имеют высококачественные соединения подшипников. Каковы шесть степеней свободы шестиосевого робота и угловой диапазон каждой оси? Шесть степеней свободы руки робота: A: талия 0-180 градусов B: большие и маленькие руки взаимодействуют друг с другом, и диапазон угла вращения варьируется. C: большие и маленькие руки взаимодействуют друг с другом. Диапазон угла поворота-переменный. D: Вращение руки 0-180 градусов E: запястье 0-180 градусов F: коготь 0-180 градусов (0 ~ 180 градусов-это теоретическое значение, фактический угол составляет от 5 до 175 градусов)
Что может сделать шестиосевая модель робота? Модель robot arm-это модель пропорции промышленного робота ABB. Он может фактически контролировать движение модели руки робота в соответствии с идеей числового управления. Он подходит для обучения экспериментам, фокусируется на демонстрации действий и не имеет реальной несущей способности. Какой материал рукоятки робота? Пластина модели манипулятора-ПВХ инженерные пластмассы и изготавливается с ЧПУ. Механическое узкое место роботизированной руки-это крутящий момент сервопривода, пластина манипулятора не деформирована и сервопривод не имеет мощности. Еще одно преимущество инженерного пластика ПВХ заключается в том, что пластичность материала очень подходит для Инкрустированного подшипника, а соединение подшипника используется для повышения точности конструкции. Все шарниры рукоятки имеют высококачественные соединения подшипников. Каковы шесть степеней свободы шестиосевого робота и угловой диапазон каждой оси? Шесть степеней свободы руки робота: A: талия 0-180 градусов B: большие и маленькие руки взаимодействуют друг с другом, и диапазон угла вращения варьируется. C: большие и маленькие руки взаимодействуют друг с другом. Диапазон угла поворота-переменный. D: Вращение руки 0-180 градусов E: запястье 0-180 градусов F: коготь 0-180 градусов (0 ~ 180 градусов-это теоретическое значение, фактический угол составляет от 5 до 175 градусов)![09]() Какова точность руки робота? Поскольку мощность роботизированной модели рычага-это рулевая передача, используемая в модельной индустрии, внутренняя передача, используемая в руле, является обычным редуктором, И зазор шестерни выражен в запястье с свободным ходом около 4 мм, Который подходит для обучения и контроля теорией проверки и не подходит для промышленного использования. Производственная линия. Полный набор шестиосевой механической рукоятки завод предварительно запрограммировал действие для проведения теста, рука робота может управляться подключением к источнику питания. Необходимо сделать различные действия, можно запрограммировать снова. В чем разница между шестью осями и шестью осями полного набора? Шестиосевая рука робота (в сборе с сервоприводом) * 1 Модифицированная запасная винтовая посылка * 1 -------------------------------------------------- ---------------- Полный набор шестиосевых моделей роботов включает в себя: Шестиосевая рука робота (в сборе с сервоприводом) * 1 Arduino uno r3 * 1 Плата расширения Arduino * 1 5V4A импульсный источник питания * 1 Модифицированная запасная винтовая посылка * 1 Подключается к программированию питания, завод оснащен роботизированным испытанием действий
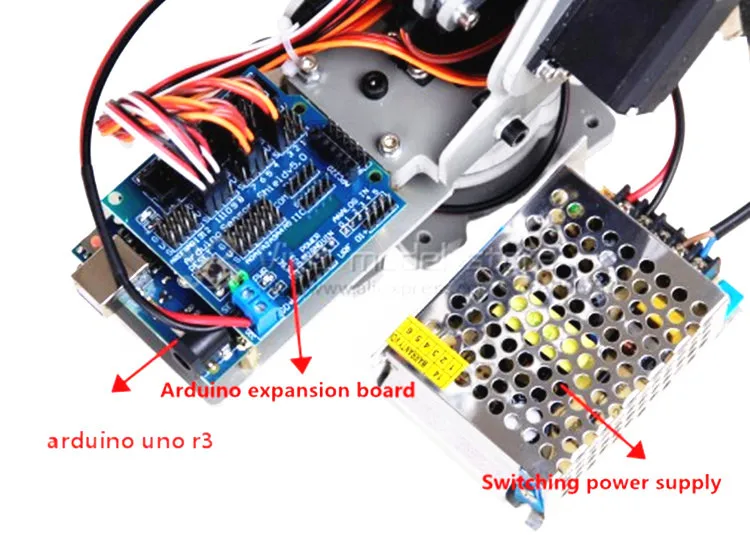
Какова точность руки робота? Поскольку мощность роботизированной модели рычага-это рулевая передача, используемая в модельной индустрии, внутренняя передача, используемая в руле, является обычным редуктором, И зазор шестерни выражен в запястье с свободным ходом около 4 мм, Который подходит для обучения и контроля теорией проверки и не подходит для промышленного использования. Производственная линия. Полный набор шестиосевой механической рукоятки завод предварительно запрограммировал действие для проведения теста, рука робота может управляться подключением к источнику питания. Необходимо сделать различные действия, можно запрограммировать снова. В чем разница между шестью осями и шестью осями полного набора? Шестиосевая рука робота (в сборе с сервоприводом) * 1 Модифицированная запасная винтовая посылка * 1 -------------------------------------------------- ---------------- Полный набор шестиосевых моделей роботов включает в себя: Шестиосевая рука робота (в сборе с сервоприводом) * 1 Arduino uno r3 * 1 Плата расширения Arduino * 1 5V4A импульсный источник питания * 1 Модифицированная запасная винтовая посылка * 1 Подключается к программированию питания, завод оснащен роботизированным испытанием действий![10]() Каков полноразмерный набор управления с шестью осями? Роботизированная рукоятка управляется MCU arduino. В программном обеспечении arduino ide роботизированное движение руки редактируется на языке C. Через usb-кабель, загружаемый на MCU arduino, MCU arduino может самостоятельно управлять рукой робота, чтобы завершить действие с компьютера. (Предоставьте обучающие программы arduino и код примера управления)
Каков полноразмерный набор управления с шестью осями? Роботизированная рукоятка управляется MCU arduino. В программном обеспечении arduino ide роботизированное движение руки редактируется на языке C. Через usb-кабель, загружаемый на MCU arduino, MCU arduino может самостоятельно управлять рукой робота, чтобы завершить действие с компьютера. (Предоставьте обучающие программы arduino и код примера управления)![04]()
![02]()
![03]()
![06]()
![07]()
Смотрите так же другие товары: