Характеристики
Radiolink SU04 ультразвуковая фотолампа с высокоточным гидролокатором для Pixhawk mini PIX
История изменения цены
*Текущая стоимость 1 506,23 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц |
Минимальная цена |
Макс. стоимость |
Цена |
| Apr-05-2026 |
1792.18 руб. |
1882.3 руб. |
1837 руб. |
| Mar-05-2026 |
1777.70 руб. |
1866.99 руб. |
1821.5 руб. |
| Feb-05-2026 |
1491.0 руб. |
1566.60 руб. |
1528.5 руб. |
| Jan-05-2026 |
1747.44 руб. |
1834.35 руб. |
1790.5 руб. |
| Dec-05-2025 |
1521.64 руб. |
1597.43 руб. |
1559 руб. |
| Nov-05-2025 |
1717.7 руб. |
1803.94 руб. |
1760 руб. |
| Oct-05-2025 |
1702.7 руб. |
1787.6 руб. |
1744.5 руб. |
| Sep-05-2025 |
1687.36 руб. |
1771.27 руб. |
1729 руб. |
| Aug-05-2025 |
1672.40 руб. |
1756.71 руб. |
1714 руб. |
Описание товара




Radiolink SU04 Ультразвуковой модуль обхода препятствий с высокой точностью sonar
Для управления полетом Pixhawk mini PIX APM2.8
![1_]()
![2_]()
![3_]()
![4_]()
![5_]()
![6_]()
![7_]()
![8_]()
![9_]() SU04 Ультразвуковой модуль обхода препятствий фиксированной высоты
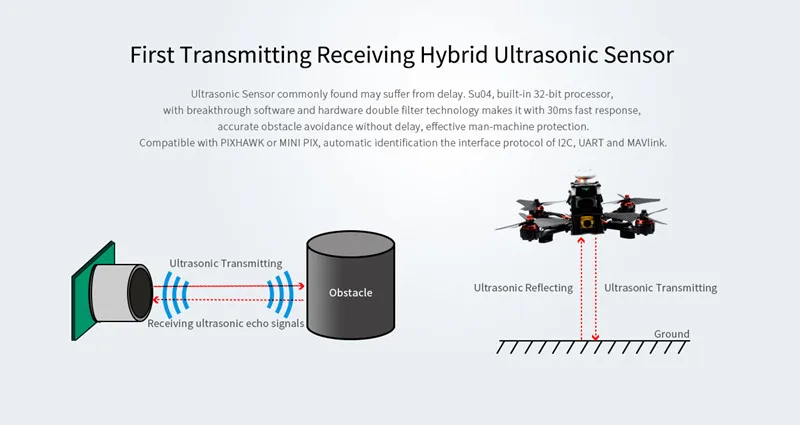
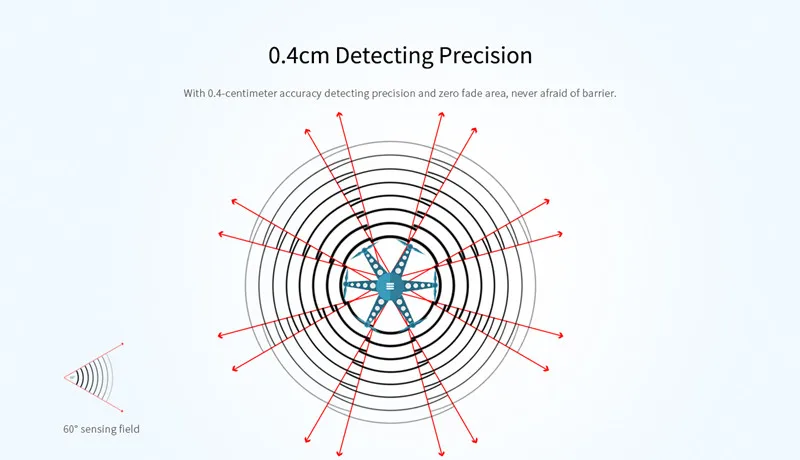
SU04 является ультразвуковым трансивером интегрированного диапазона модуля. Всенаправленный модуль предотвращения препятствий и установки высоты для управления полетом PIXHAWK может реализовать барьер 8 направлений уровня pixhawk, предотвращение столкновений вверх и фиксированная высота вниз. Диапазон модуля составляет 40-450 см.
Функция 1: Предотвращение препятствий
1, прошивка поддержка
Препятствие функция предотвращения требует прошивки версии больше или равна 3,5 версия!
2. Установите модуль
Подключите управление полетом: Подключите телеметрический порт к 6-контактному кабелю и подключите модуль к другому концу.
SU04 Ультразвуковой модуль обхода препятствий фиксированной высоты
SU04 является ультразвуковым трансивером интегрированного диапазона модуля. Всенаправленный модуль предотвращения препятствий и установки высоты для управления полетом PIXHAWK может реализовать барьер 8 направлений уровня pixhawk, предотвращение столкновений вверх и фиксированная высота вниз. Диапазон модуля составляет 40-450 см.
Функция 1: Предотвращение препятствий
1, прошивка поддержка
Препятствие функция предотвращения требует прошивки версии больше или равна 3,5 версия!
2. Установите модуль
Подключите управление полетом: Подключите телеметрический порт к 6-контактному кабелю и подключите модуль к другому концу.
![11_]() Примечание: При использовании модуля pixhawk не может питаться от USB и должен питаться от lipo-battery
3. Инструкции по конфигурации
Примечание: При использовании модуля pixhawk не может питаться от USB и должен питаться от lipo-battery
3. Инструкции по конфигурации
![12_]() 3,1 выбор модуля (pixhawk поддерживает 4 модуль обхода препятствий s, следующий выбран как модуль обхода препятствий, установив значение PRX_TYPE)
Конкретные настройки: Введите-Настройка/отладка интерфейса, нажмите на таблицу параметров слева-все, введите PRX _ Тип (модуль обхода препятствий) В правом нижнем углу-вход и нажмите Enter для поиска этого параметра. Дважды щелкните значение параметра и установите его на 2 (т. Е. Выберите этот модуль, потому что этот модуль связывается с управлением полетом через протокол mavlink порта telem), снова нажмите на параметр-запись справа.
3,2 Установка препятствий расстояние избегания и открытие препятствий
1) Расстояние избегания препятствий модуля может быть установлено путем изменения двух значений AVOID_DIST_MAX и AVOID_MARGIN.
AVOID_DIST_MAX: максимальное расстояние избегания препятствий в режиме постоянной высоты, в m
AVOID_MARGIN: максимальное расстояние избегания препятствий в режиме, в m
2) функция открытия/закрытия препятствий устанавливается путем изменения значения AVDIO_ENABLE.
AVDIO_ENABLE: открыть и закрыть функцию предотвращения препятствий, 2 Открыть · 0 закрыть
3) конкретные параметры
Введите-Настройте/отлаживайте интерфейс, нажмите на дерево параметров слева-все, кликните левой кнопкой на AVDIO, появятся три вышеуказанных параметра.
Щелчок левой кнопкой мыши параметр и установите значение AVDIO_DIST_MAX до 3 (то есть 3 м, допустимое значение составляет 3 ~ 4,5).
Значение AVDIO_ENABLE 2 (включено предотвращение препятствий, 0-это Предотвращение препятствий), а значение AVDIO_MARGIN-3.
(Т. Е. 3 м, допустимое значение-1 ~ 10), затем нажмите на правый параметр записи
3,3 установка пульта дистанционного управления для открытия/закрытия функции предотвращения препятствий (опционально)
1) этот товар является необязательным и может быть пропущен
Управление полетом по умолчанию осуществляется в режиме высокой высоты и в режиме ожидания. Функция предотвращения препятствий автоматически включается. При автоматическом переключении функция избегания препятствий автоматически отключается. Однако, если вы хотите включить или выключить функцию предотвращения препятствий в режиме реального времени через пульт дистанционного управления, вам нужно сделать эту настройку. Если вы хотите автоматически включить функцию избегания препятствий только в фиксированном режиме высоты и ожидания, вы можете пропустить эту настройку.
2) установите параметр CH7_OPT;
Введите-конфигурация/интерфейс отладки, нажмите на таблицу параметров слева-все, введите CH7_OPT в правом нижнем углу-вход и нажмите Enter, вы можете найти этот параметр, дважды щелкните значение параметра, чтобы установить до 40 (функция избегания препятствий объекта), затем нажмите на параметр записи правой кнопкой.
4. Просмотра данных
После завершения вышеуказанной конфигурации вы можете просмотреть данные модуля, отсоединить pixhawk и перезапустить планировщик миссии и автоматически запустить новый интерфейс при подключении наземной станции планировщика миссии. Этот интерфейс можно просмотреть
Состояние данных модуля.
5. Фактический налет
После настройки всех вышеуказанных шагов в pixhawk, перезагрузите управление полетом pixhawk, чтобы проверить снова. Правильно ли настроены указанные выше параметры. В противном случае, если параметры не настроены успешно, это может привести к сбою во избежание препятствий.
После подтверждения того, что pixhawk правильно настроен со всеми параметрами, первый полет, вы можете найти место с стеной и другими препятствиями и фактическим испытанием.
Функция 2: Предотвращение столкновений вверх
Функции предотвращения столкновений вверх и предотвращения препятствий одинаковые, но направление модуля необходимо установить на кнопку вверх. Когда ток движется вперед, нажмите кнопку один раз, светильник модуля мигает несколько раз, и данные просматриваются через землю.
Функция 3: функция фиксированной высоты
1, Инструкция по установке
Подключите порт I2C Pixhawk с одним концом 4pin и модулем к другому концу. Модуль устанавливается в направлении вниз.
2, инструкции по конфигурации
Перейдите на Начальный экран настройки, нажмите на дополнительное оборудование слева, затем нажмите на выпадающее меню и выберите «MaxbotixI2C» или «LightWareI2C»
Нет необходимости сохранять, перезапустить управление полетом, а затем вернуться к этому интерфейсу, масштаб появится, репрезентативный набор успешен
RNGFND_MAX_CM установлен до 450 и RNGFND_MIN_CM установлен до 40 см
RNGFND_MAX_CM-это максимальное расстояние, которое Контроллер полета может определить модуль в режиме фиксированной высоты.
RNGFND_MAX_CM-это минимальное расстояние, которое Контроллер полета может определить модуль в режиме фиксированной высоты.
Когда расстояние, отправленное модулем, превышает 40-450 см, Контроллер полета не распознает расстояние модуля, а расстояние определяется расстоянием барометра.
3,1 выбор модуля (pixhawk поддерживает 4 модуль обхода препятствий s, следующий выбран как модуль обхода препятствий, установив значение PRX_TYPE)
Конкретные настройки: Введите-Настройка/отладка интерфейса, нажмите на таблицу параметров слева-все, введите PRX _ Тип (модуль обхода препятствий) В правом нижнем углу-вход и нажмите Enter для поиска этого параметра. Дважды щелкните значение параметра и установите его на 2 (т. Е. Выберите этот модуль, потому что этот модуль связывается с управлением полетом через протокол mavlink порта telem), снова нажмите на параметр-запись справа.
3,2 Установка препятствий расстояние избегания и открытие препятствий
1) Расстояние избегания препятствий модуля может быть установлено путем изменения двух значений AVOID_DIST_MAX и AVOID_MARGIN.
AVOID_DIST_MAX: максимальное расстояние избегания препятствий в режиме постоянной высоты, в m
AVOID_MARGIN: максимальное расстояние избегания препятствий в режиме, в m
2) функция открытия/закрытия препятствий устанавливается путем изменения значения AVDIO_ENABLE.
AVDIO_ENABLE: открыть и закрыть функцию предотвращения препятствий, 2 Открыть · 0 закрыть
3) конкретные параметры
Введите-Настройте/отлаживайте интерфейс, нажмите на дерево параметров слева-все, кликните левой кнопкой на AVDIO, появятся три вышеуказанных параметра.
Щелчок левой кнопкой мыши параметр и установите значение AVDIO_DIST_MAX до 3 (то есть 3 м, допустимое значение составляет 3 ~ 4,5).
Значение AVDIO_ENABLE 2 (включено предотвращение препятствий, 0-это Предотвращение препятствий), а значение AVDIO_MARGIN-3.
(Т. Е. 3 м, допустимое значение-1 ~ 10), затем нажмите на правый параметр записи
3,3 установка пульта дистанционного управления для открытия/закрытия функции предотвращения препятствий (опционально)
1) этот товар является необязательным и может быть пропущен
Управление полетом по умолчанию осуществляется в режиме высокой высоты и в режиме ожидания. Функция предотвращения препятствий автоматически включается. При автоматическом переключении функция избегания препятствий автоматически отключается. Однако, если вы хотите включить или выключить функцию предотвращения препятствий в режиме реального времени через пульт дистанционного управления, вам нужно сделать эту настройку. Если вы хотите автоматически включить функцию избегания препятствий только в фиксированном режиме высоты и ожидания, вы можете пропустить эту настройку.
2) установите параметр CH7_OPT;
Введите-конфигурация/интерфейс отладки, нажмите на таблицу параметров слева-все, введите CH7_OPT в правом нижнем углу-вход и нажмите Enter, вы можете найти этот параметр, дважды щелкните значение параметра, чтобы установить до 40 (функция избегания препятствий объекта), затем нажмите на параметр записи правой кнопкой.
4. Просмотра данных
После завершения вышеуказанной конфигурации вы можете просмотреть данные модуля, отсоединить pixhawk и перезапустить планировщик миссии и автоматически запустить новый интерфейс при подключении наземной станции планировщика миссии. Этот интерфейс можно просмотреть
Состояние данных модуля.
5. Фактический налет
После настройки всех вышеуказанных шагов в pixhawk, перезагрузите управление полетом pixhawk, чтобы проверить снова. Правильно ли настроены указанные выше параметры. В противном случае, если параметры не настроены успешно, это может привести к сбою во избежание препятствий.
После подтверждения того, что pixhawk правильно настроен со всеми параметрами, первый полет, вы можете найти место с стеной и другими препятствиями и фактическим испытанием.
Функция 2: Предотвращение столкновений вверх
Функции предотвращения столкновений вверх и предотвращения препятствий одинаковые, но направление модуля необходимо установить на кнопку вверх. Когда ток движется вперед, нажмите кнопку один раз, светильник модуля мигает несколько раз, и данные просматриваются через землю.
Функция 3: функция фиксированной высоты
1, Инструкция по установке
Подключите порт I2C Pixhawk с одним концом 4pin и модулем к другому концу. Модуль устанавливается в направлении вниз.
2, инструкции по конфигурации
Перейдите на Начальный экран настройки, нажмите на дополнительное оборудование слева, затем нажмите на выпадающее меню и выберите «MaxbotixI2C» или «LightWareI2C»
Нет необходимости сохранять, перезапустить управление полетом, а затем вернуться к этому интерфейсу, масштаб появится, репрезентативный набор успешен
RNGFND_MAX_CM установлен до 450 и RNGFND_MIN_CM установлен до 40 см
RNGFND_MAX_CM-это максимальное расстояние, которое Контроллер полета может определить модуль в режиме фиксированной высоты.
RNGFND_MAX_CM-это минимальное расстояние, которое Контроллер полета может определить модуль в режиме фиксированной высоты.
Когда расстояние, отправленное модулем, превышает 40-450 см, Контроллер полета не распознает расстояние модуля, а расстояние определяется расстоянием барометра.
Смотрите так же другие товары:
























