
Сверхмощный Черный Позолоченный двухкулачковый редуктор арматурный подшипник
528,42 - 1 277,51 руб.

Новое поступление
Характеристики
*Текущая стоимость 187,65 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-04-2026 | 237.65 руб. | 242.6 руб. | 239.5 руб. |
| Feb-04-2026 | 193.58 руб. | 197.42 руб. | 195 руб. |
| Jan-04-2026 | 234.15 руб. | 239.71 руб. | 236.5 руб. |
| Dec-04-2025 | 232.55 руб. | 237.90 руб. | 234.5 руб. |
| Nov-04-2025 | 185.90 руб. | 189.53 руб. | 187 руб. |
| Oct-04-2025 | 228.82 руб. | 233.82 руб. | 230.5 руб. |
| Sep-04-2025 | 226.9 руб. | 231.76 руб. | 228.5 руб. |
| Aug-04-2025 | 224.95 руб. | 228.70 руб. | 226 руб. |
Описание товара





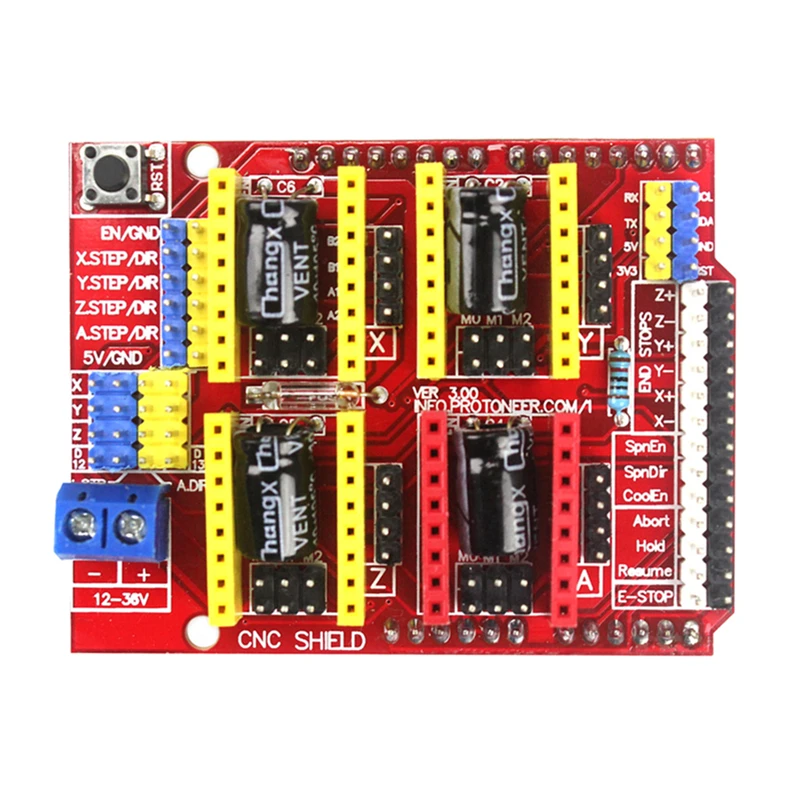
Плата расширения может использоваться в качестве платы расширения привода для гравировальных машин, 3D-принтеров и т. д. Всего 4 шага слота модуля привода шагового двигателя (обратите внимание, что эта плата не включает модуль привода шагового двигателя A4988, который можно приобрести отдельно в магазине) Он может управлять 4 каналами без входа в двигатель, и каждому шаговому двигателю требуется только 2 порта IO. То есть, 6 портов IO могут хорошо управлять 3 шаговыми двигателями, что очень удобно в использовании. Традиционные шаговые двигатели громоздкие для работы. Основной контроль шагового двигателя требует контактов. Другие контакты используются в гравировальной машине или 3d-принтере. Мы не объясним их здесь. IO соответствует Приведенному выше рисунку. UNO -------------------- Плата расширения 8 ------------------------ EN (шаговый двигатель включен, активный низкий) 7 --------------------- Z.DIR (управление направлением оси Z) 6 -------------------- Y.DIR (управление направлением оси Y) 5 --------------------- X.DIR (управление направлением по оси X) 4 --- Z. Шаг (ось Z шаг управления) 3 -------------------- Y. Шаг (шаговый контроль оси Y) 2 ------------------------- X. Шаг (управление шагом по оси) /Ниже приводится простая программа управления шаговым двигателем. # Define EN 8/шаговый двигатель включен, активный низкий # Define X_DIR 5/управление направлением шагового двигателя по оси X # Define Y_DIR 6/управление направлением шагового двигателя оси y # Define Z_DIR 7/ось z шаговый двигатель управление направлением # Define X_STP 2/ступенчатое Управление по оси x # Define Y_STP 3/Управление осями y # Define Z_STP 4/ступенчатое управление оси z /* /Функция: функция шага: Управляйте направлением шагового двигателя, количеством шагов. /Параметры: dir управление направлением, dirPin соответствует DIR pin шагового двигателя, шаг pin соответствует шагового штифта шагового двигателя, шаг количество шагов /Нет возвращаемого значения */ Шаг пустоты (булевое dir, байтовый dirPin, байтовый шаг, шаги int) { DigitalWrite (dirPin, dir); Задержка (50); Для (int i = 0; i < steps; i + +) { DigitalWrite (stepperPin, HIGH); DelayMicroseconds (800); DigitalWrite (stepperPin, LOW); DelayMicroseconds (800); } } Void setup(){/Установите IO pin, используемый шаговым двигателем для вывода PinMode (X_DIR, OUTPUT); pinMode(X_STP, OUTPUT); PinMode (Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT); PinMode (Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT); PinMode (EN, OUTPUT); DigitalWrite (EN, LOW); } Пустая петля (){ Шаг (false, X_DIR, X_STP, 200); /двигатель оси X Реверсивный 1 поворот, 200 шагов для круга Шаг (false, Y_DIR, Y_STP, 200); /двигатель оси y Реверсивный 1 поворот, 200 шагов за один поворот Шаг (false, Z_DIR, Z_STP, 200); /двигатель оси z Реверсивный 1 поворот, 200 шагов за один поворот Задержка (1000); Шаг (true, X_DIR, X_STP, 200); /двигатель оси X вращается 1 поворот, 200 шагов-круг Шаг (true, Y_DIR, Y_STP, 200); /двигатель оси y вращается на один поворот, 200 шагов на один поворот Шаг (true, Z_DIR, Z_STP, 200); /двигатель оси z вращается на один поворот, 200 шагов на один поворот Задержка (1000); } Экспериментальное явление: шаговый двигатель меняет один круг, останавливает на 1 секунду, а затем проходит один круг, тем самым циркулируя. Стоит отметить, что при подключении к модулю A4988 будьте осторожны, чтобы не вставлять заднюю часть. Метод проводки шагового двигателя: 2A, 2B-это группа (красный, зеленый), 1A, 1B-это группа (синий, желтый), которая хочет изменить направление, изменить положение одной группы, такой как 2A, обмен с 2B.







Смотрите так же другие товары:






