
Raspberry pi питание EU/US мини зарядное устройство для raspberry 3 Model B/B + raspberrry адаптер
71,14 руб.


Новое поступление
Характеристики
*Текущая стоимость 7 564,10 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Apr-04-2026 | 9001.25 руб. | 9451.19 руб. | 9226 руб. |
| Mar-04-2026 | 8926.57 руб. | 9372.4 руб. | 9149 руб. |
| Feb-04-2026 | 7488.86 руб. | 7862.90 руб. | 7675 руб. |
| Jan-04-2026 | 8774.96 руб. | 9213.13 руб. | 8993.5 руб. |
| Dec-04-2025 | 7640.9 руб. | 8022.95 руб. | 7831 руб. |
| Nov-04-2025 | 8623.34 руб. | 9054.24 руб. | 8838.5 руб. |
| Oct-04-2025 | 8547.59 руб. | 8974.64 руб. | 8760.5 руб. |
| Sep-04-2025 | 8472.44 руб. | 8896.25 руб. | 8684 руб. |
| Aug-04-2025 | 8396.8 руб. | 8816.64 руб. | 8606 руб. |
Описание товара





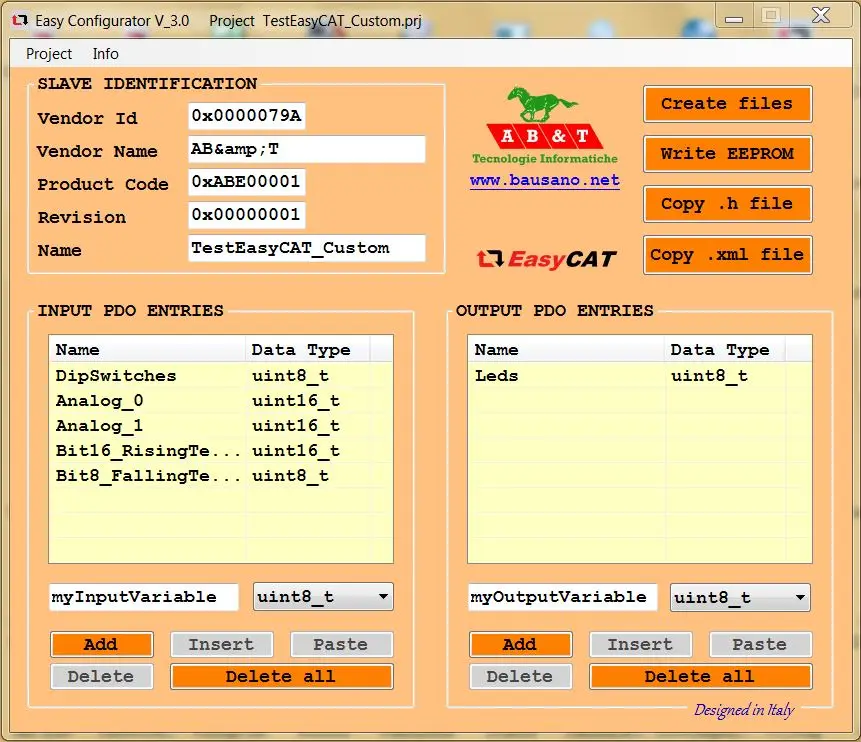
EtherCAT Плата развития обучения щит EasyCAT slave station для быстрого развития Arduino Эта плата разработки характеризуется сочетающимся инструментом, который может автоматически генерировать словаря объекта, вам нужно только написать код приложения, нет необходимости изменять громоздкий код протокола и Словаря объекта! Этот продукт является внутренней версией продуктов Bausano (изменен от линейного источника питания до эффективного импульсного источника питания), который может полностью использовать все процедуры и инструменты, предоставленные Bausano //www.bausano.net/en/hardware/ethercat-e-arduino/easycat.html. (Этот продукт особенно хорош для пользователей, которые не хотят вкладывать слишком много усилий в исходный код. Большинство плат по разработке EtherCAT предоставляют только набор образцов кода (включая Бесплатный Код, предоставленный самим Beckhoff), но на самом деле изменение словаря объекта EtherCAT-это большая работа. Поддерживающий конфигуратор EtherCAT этого продукта может завершить эту утомительную работу от имени пользователя. EasyCAT (щит Arduino) инструкции по использованию EasyCAT для разработки slave station EtherCAT Инструкции по уходу за изделием //wenku.baidu.com/view/3a97439eff4733687e21af45b307e87100f6f80b Http://www.doc88.com/p-9436171912691.html //www.bausano.net/images/arduino-easycat/EasyCAT_AN002.pdf Отказ от ответственности: Этот продукт принимает только возврат качества. Принцип заключается в том, что работорговля не может быть разработана в соответствии с инструкциями. Если у вас нет Arduino Совет по развитию, это очень рекомендую купить пачку с arduinouno или 2560. Хотя EasyCAT может в значительной степени упростить развитие рабов, он по-прежнему является профессиональным. Владелец не доступен в будние дни. Если у вас есть какие-либо технические проблемы, пожалуйста, свяжитесь с 13439297770 или с тем же номером WX Ввести EasyCAT-это щит Arduino, который значительно упрощает разработку подчиненных станций EtherCAT с помощью технологии Arduino и подходит для решений автоматизации на базе ПК. Он имеет следующие характеристики: Сетевой порт 100base-tx для Ethernet в реальном времени включен. Он может использоваться с Совет по развитию в соответствии с Arduino, и прошел испытание на основе следующих Совет по развитию; Arduino Uno Arduino 2560 Регуляторы будут приняты на плате для того, чтобы обеспечить 3,3 vethercat микросхема сети источника питания на основе Arduino 5V, с низкой теплотворной способностью; Все компоненты на плате используют устройства промышленного класса; Поддержка использования библиотеки протоколов с открытым исходным кодом, с инструментом генерации кода слоя приложения подчиненной станции, значительно упрощает разработку кода протокола связи, позволяя пользователям фокусироваться на разработке конкретных приложений В дополнение к поддерживающей библиотеки Arduino с открытым исходным кодом, также доступен инструмент для генерации кода слоя приложения EtherCAT slave Библиотека EasyCAT: пользователи Редактируют словаря объектов на основе EasyCAT_Config_GUI, поддерживают ing PDO; Поддерживает режим IRQ и чиповую связь, минимальное пространство кода; AuduCAT library: пользователям нужно только редактировать таблицу EXCEL для создания полного стека протоколов, который поддерживает s PDO, CoE (CANOpen over EtherCAT) и битную работу. Поддерживает режим IRQ и чиповую связь (Flash>= 64 КБ). EasyCAT конфигурации На EasyCAT есть несколько хопперов для настройки связи между EasyCAT и Arduino. SPI SS сигнала Сигнал выбора чипа SPI (SS) настраивается с помощью перемычки на короткие контакты P3, доступны порты s 6, 7, 8, 9, 10 и A5. По умолчанию используется порт 9. 2. Сигнал прерывания EasyCAT выводит EtherCAT прерывает на порт Arduino 2 в дополнение к изменению кода соответственно, есть три варианта, которые будут выбраны P2 следующим образом: Запрос (опрос) режим (по умолчанию) : P2 свисает. Arduino связывается с EtherCAT путем запроса. Этот метод прост, но менее эффективен, подходит для общих приложений; Режим прерывания EtherCAT: P2 левый короткий перемычка с двумя контактами. Arduino получает сигнал IRQ от прерывания EtherCAT, т. Е. LAN9252; Этот метод является эффективным и подходит для приложений, которые не используют распределенные часы (DC). Сигнал переключается на EasyCAT с помощью не-ворот. DC (распределительные часы) : 2 фута слева от короткого перемычки P2. Arduino принимает прерывание EtherCAT, сигнал синхронизации lan9252. Этот метод является эффективным и подходит для применения распределенных часов (DC). Этот сигнал переключается на EasyCAT. SPI сигнала EasyCAT по умолчанию использует порт SPI разъема ICSP. Для плат Arduino без ICSP также поддерживаются порты SPI на портах 11, 13 и 12. На данный момент пользователю необходимо коротко использовать R71, R72 и R75 на задней стороне EasyCAT. EasyCAT модели В качестве примера в этой таблице приведен пример TestEasyCAT_Custom. Загрузите и установите программное обеспечение Arduino Http://arduino.cc/en/Main/Software. Arduinousb драйвер последовательного порта Адрес загрузки: http://wch.cn/downloads.php?Name = pro & proid = 65 Адрес загрузки для иностранных клиентов: http://www.wch-ic.com/download/list.asp?Id = 126 Огонь и вода EasyCAT Библиотека EasyCAT библиотека EasyCAT: //www.bausano.net/images/arduino-easycat/EasyCAT.zip Конфигурационный инструмент EasyCAT конфигуратор EasyCAT: //www.bausano.net/images/arduino-easycat/EasyConfigurator_V3_0.zip Подключение EasyCAT Порт 9 EasyCAT P3 с перемычкой; P2 остается приостановленным. Подключите EasyCAT к плате Arduino. Подключите USB и сетевой кабель (Подключите к PORT0). Скомпилируйте и загрузите программу Arduino Дважды щелкните, чтобы открыть EasyCAT_V2_0 \ примеры \ TestEasyCAT_Custom \ testeasycat_custom.ino. Выберите проект/Добавить файл, в всплывающем окне выберите EasyCAT_V2_0 \ easycat.h, нажмите ok, затем easycat.h отображается на правой стороне основного файла в рамках проекта. Подключите Arduino и выберите соответствующую макетную плату в разделе «инструменты/макетная плата» и «инструменты/процессор»; Выберите порт последовательного порта, соответствующий Arduino, в разделе «инструменты/порт»; Нажмите «загрузить» (значок стрелки вправо), чтобы скомпилировать и загрузить на макетную плату. Импорт файла описания устройства Скопируйте EasyCAT_V2_0 \ примеры \ TestEasyCAT_Custom \ testeasycat_custom.xml в C:\ TwinCAT \ 3,1 \ Config \ Io \ EtherCAT (Если установлен в другом каталоге, измените адрес копии соответственно). Откройте огонь Откройте TwinCAT XAE из панели задач Нажмите на файл/Новый/проект..., Был создан проект TwinCAT XAE. Щелкните правой кнопкой мыши «I/O' /Devices» и выберите «добавить новый элемент...». Выберите «EtherCAT/EtherCAT» и нажмите OK. Установите и включите сетевую карту (это необходимо для первой операции) Этот раздел выполняется только при первом запуске TwinCAT. После добавления устройства EtherCAT, как описано в предыдущей части, нажмите устройство и нажмите на вкладку адаптер на правой форме. Нажмите на кнопку «совместимые устройства» Выберите соответствующую сетевую карту и нажмите «установить» и «включить», затем закройте окно. Нажмите «Поиск», выберите соответствующую сетевую карту и нажмите «ок». Блок горения записи EEPROM Сканирующих устройств Нажмите выберите устройство EtherCAT, затем нажмите кнопку сканирования (или нажмите F5) и выберите «да» из всех всплывающих диалогов. В Совет по развитию представлена и перечисленных в соответствии с EtherCAT устройства. Сканирующих устройств Нажмите на панель разработки, которую вы находите, и выберите вкладку «EtherCAT» в правой форме. Нажмите «дополнительные настройки...», затем выберите «ESC доступ/E2PROM/Hex Editor». Нажмите «скачать из списка» в правом нижнем углу, перейдите в AB & T/EasyCAT/TestEasyCAT_Custom (устройство для недавно скопированного. xml файл) и нажмите OK. Подождите немного, и информацию с сайта загружается в EEPROM совет по развитию. Тест со станции После загрузки программы EtherCAT ведомой станции была создана на arducat Совет по развитию. Тестовые рабочие станции могут использовать TwinCAT, EtherCAT конфигуратор или другое программное обеспечение master station. Метод тестирования и тест, как правило, одинаковые рабочие станции, Нет ничего особенного. Эта бумага принимает программное обеспечение TwinCAT в качестве примера и дает метод тестирования подчиненной станции. С другим программным обеспечением, метод тестирования аналогичен. Подключите ПК к порту 0 платы разработки с помощью кабеля Ethernet. Сканирующих устройств Нажмите выберите устройство EtherCAT, нажмите кнопку сканирования (или нажмите F5) и выберите «да» из всех всплывающих диалогов. Макетная плата находится и перечисляется под устройством EtherCAT. Нажмите на схему разработки. Проверьте переключатель от функции состояния станции Нажмите на открытую макетную доску. Нажмите на вкладку «онлайн» в правой части формы. Нажмите кнопки «Init», «pre-op», «safe-op» и «OP» в коробке «State Machine» для переключения между четырьмя состояниями. Обратите внимание, что последние два состояния доступны только при нажатии кнопки Free run. Обрабатывает данные тестирования СЕ функция может использоваться, чтобы убедиться в том, что процесс данные передаются правильно Тест Tx PDO (объект обработки данных) Вход в TxPDO-это данные, введенные от подчиненной станции до главной станции. Переменная Bit16_RisingTestRamp в TestEasyCAT_Custom может видеть Увеличение данных, и Bit8_FallingTestRamp может читать данные уменьшения. Rx PDO (объект обработки данных) тест В TestEasyCAT_Custom светодиод в RxPDO выводится на контакты A2 ~ A5. После выбора светодиодов нажмите кнопку «написать» на закладке «онлайн» и заполните 5. Напряжение четырех контактов A2 ~ A5 может быть измерено поочередно как 5 в и 0 в с мультиметром. Напишите свою собственную программу EasyCAT Настройка подчиненной станции на основе EasyConfigurator Скачать easyconfigurator. Распакуйте и откройте EasyConfigurator_V3_2 \ Exe \ easycat_config_gui.exe. Введите информацию об устройстве. Верхняя левая область-это общая информация, включая код производителя, название производителя, код продукта, версию продукта и название продукта. Нижняя Левая область является входной переменной (TxPDO), которая является переменной, введенной от EasyCAT к ПК. Нижняя правая область-выходная переменная (RxPDO), Переменная, Выходная от ПК к EasyCAT. После редактирования сохраните и нажмите «создать файлы». В этот момент в каталоге появятся три файла, а именно. Bin file (EEPROM file),.xml файл (slave device description file) и. h файл (PDO variable definition file). Файл должен быть скопирован в соответствующее место после его создания. Среди них . Bin файл: нет необходимости копировать. . Xml-файл: Скопируйте в каталог TwinCAT (TwinCAT \ 3,1 \ Config \ Io \ EtherCAT) . Файл h: Скопируйте в проект Arduino, который вы написали позже. Подготовка исходных файлов Arduino Скрипт Arduino для EasyCAT (.ino) содержит следующее. Ссылка на файл заголовка переменной определения PDO # Определить изготовленный на заказ # Включает в себя "TestEasyCAT_Custom. H" См. Заголовки EasyCAT и SPI # Включая "EasyCAT. H" # Включая <SPI. H> Определение объекта EasyCAT EasyCAT; Если штифт SPI_SS должен быть заменен, его можно определить следующим образом (указывая использование D8 в качестве штифта). EasyCAT (8) Выполните инициализацию EasyCAT в setup(). EASYCAT. Init () Выполните функцию EasyCAT в цикле (). EASYCAT. Основная задача (); Данные процесса чтения/записи Определение данных процесса можно увидеть в файле заголовка. Вообще говоря, входная переменная (TxPDO) выражена как: EASYCAT. Бафферин. Куст. XXXX Выходная переменная (RxPDO) выражена как: EASYCAT. Bufferout. Куст. XXX Это то, как программа Arduino написана по умолчанию. При работе в режиме прерывания, easycat.maintask () должен изменить код соответственно, чтобы быть вызванным прерыванием. Между тем, джемпер EasyCAT. xml и код инициализации должны быть настроены соответствующим образом.
Смотрите так же другие товары:






