
1/12 металлический Радиоуправляемый автомобиль 2 4 ГГц 4WD 35 км/ч 70 высокоскоростной
11 559,31 руб.






Новое поступление

Магазина ThanksBuyer работает с 10.09.2012. его рейтинг составлет 92.47 баллов из 100. В избранное добавили 4182 покупателя. Средний рейтинг торваров продавца 4.7 в продаже представленно 1185 наименований товаров, успешно доставлено 4135 заказов. 704 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 37 253,28 - 89 125,74 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Aug-17-2025 | 47311.78 руб. | 48257.30 руб. | 47784 руб. |
| Jul-17-2025 | 38371.47 руб. | 39138.66 руб. | 38754.5 руб. |
| Jun-17-2025 | 46566.26 руб. | 47497.97 руб. | 47031.5 руб. |
| May-17-2025 | 46194.51 руб. | 47118.70 руб. | 46656 руб. |
| Apr-17-2025 | 36880.69 руб. | 37618.66 руб. | 37249 руб. |
| Mar-17-2025 | 45449.73 руб. | 46358.11 руб. | 45903.5 руб. |
| Feb-17-2025 | 45076.12 руб. | 45978.21 руб. | 45527 руб. |
| Jan-17-2025 | 44704.4 руб. | 45598.6 руб. | 45151 руб. |
Описание товара





Механическое колесо робот автомобиль DIY умная Автомобильная рама поддержка ROS MAVROS RTK автоматический круиз бинокулярный ВИО
Пожалуйста, обратите внимание, что Lidar и другие датчики не включены в посылка
Спецификация:
Размер: 405*298*160 мм (длина * ширина * высота)
Материал: стальная пластина, обработка поверхности краской
Скорость движения: самая быстрая скорость-1 м/с
Вес: 5,5 кг
Диаметр колеса автомобиля: 130 мм
Вес нагрузки: Максимальная нагрузка ≤ 5 кг
Метод амортизации: независимая подвеска 4WD, параллельная амортизирующая структура
Режим привода: 4 группы двигателей 12 В с кодировщиком (фаза AB)
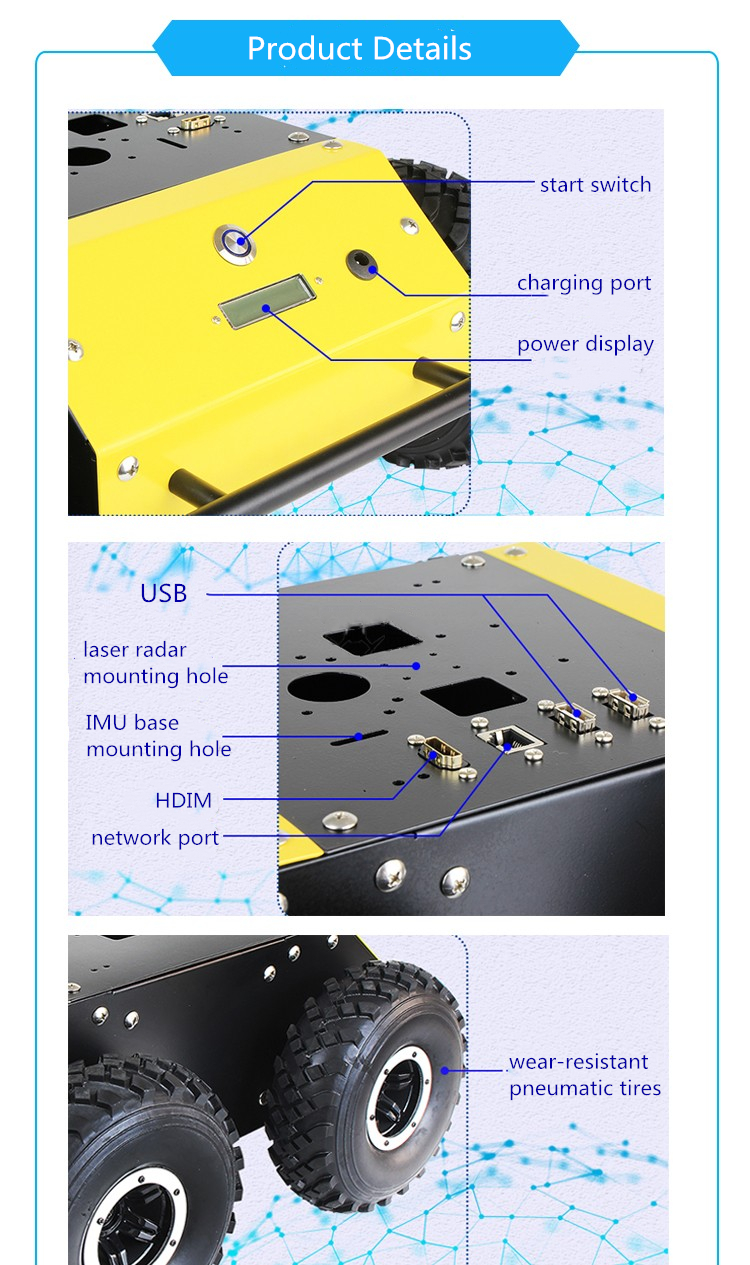
Предустановленные устройства: предварительно установленный стартовый переключатель, индикатор питания, порт зарядки на наклонной стороне кузова автомобиля, предустановленный 2-USB интерфейс, интерфейс сетевого порта, интерфейс HDMI на верхней пластине
Верхняя пластина предназначена для крепежных отверстий SLAM A1A2A3, для опорных монтажных отверстий IMU, крепежных отверстий для антенны 2,4G, для Raspberry Pi 3B + монтажный кронштейн, STM32 Монтажный кронштейн основной платы управления, Монтажный кронштейн для аккумулятора.
Функции:
-GPS Авто Круиз
-Поддержка ROS/MAVROS
-Бинокулярное позиционирование
-Телеметрия наземной станции
-Алгоритм WFH
-Предотвращение препятствий Lidar
-Распознавание изображений Opencv
-Разработка алгоритма планирования пути
-Телеметрия наземной станции
-Отслеживание выбора визуальной рамки
-Бортовой компьютерный контроль
Особенности:
1. Автоматическое планирование круиза/пути
Используя наземную станцию QGC/MP для изменения пути путевой точки, беспилотный автомобиль может завершить работу в соответствии с заданным маршрутом. Дизайн и разработка плана пути основаны на моделировании. Транспортное средство поддерживает интерфейсы ROS и GAZEBO для обеспечения идеального пути планирования среды моделирования. Код моделирования и фактический код легко переключаются.
2. Мульти-Сенсорное соединение
Позиционирование GPS, позиционирование lidar и модули визуального позиционирования имеют соответствующие аппаратные средства и интерфейсы для облегчения оценки состояния беспилотных систем (направление синтеза с помощью нескольких датчиков).
3. Визуальное позиционирование бинокулярного ВИО
Поддержка V-SLAM для прямого вывода информации о местоположении, обеспечения позиционирования, шлема, растровой карты, октомапа для беспилотных транспортных средств. В то же время Используйте бинокулярную камеру для визуального отслеживания. Например, отслеживание глубокого обучения, отслеживание выбора кадра.
4. Позиционирование Lidar
Алгоритм карторграфа предоставляет информацию о позиции для беспилотных транспортных средств и в то же время, lidar строит двумерную карту для достижения планирования пути. Поддержка 4G/5G, WIFI, передача данных RF для достижения цели локальной сети и дистанционного управления.
5. Сантиметровый уровень позиционирования
RTK (резервный RTK интерфейс) Может использоваться на открытом воздухе, поддерживая позиционирование на сантиметровом уровне.
6. Предотвращение препятствий Lidar
Используя алгоритм VFH, PIONEER car может достичь эффекта избегания препятствий в режиме реального времени в автономном режиме. В процессе автоматического круиза автомобиль непрерывно избегает препятствий без остановки, а затем поддерживает Предотвращение препятствий octree.
Посылка:
1 x механическое колесо робот шасси автомобиля только, не включены любые электронные части
Пожалуйста, выберите контроллер, если вам нужно, дополнительный контроллер
Pixhawk
Pixhawk 4
Pixhawk 2
Смотрите так же другие товары:






